Przewodnictwo jest prawdopodobnie najłatwiejszą metodą. Jest to jednak przypadek, w którym musisz szczególnie uważać na bezpieczeństwo. Byłoby dobrze wyłączyć dwie baterie AA. Wyjście może być opto, które może następnie przejść do czegokolwiek innego zasilanego w inny sposób. Linie prowadzące do łóżka łączyłyby się TYLKO z obwodem zasilanym z baterii, z dobrą przerwą 5 mm lub większą od czegokolwiek innego.
Wykrywanie wody nie jest takie trudne, a mocz będzie lepiej przewodził niż czysta woda. Dwie kolejki idą do łóżka. Każdy może być prowadzony silnie wysoko lub nisko, lub ze słabym podciąganiem lub opuszczaniem (słabo napędzany wysoko lub nisko). Każda z nich trafia również do przetwornika A / D.
W większości przypadków nic się nie dzieje i obie linie można słabo podciągnąć do masy. Mikro okresowo budzi się, aby przeprowadzić test. Istnieją 4 oddzielne testy, ale mikro musi wykonać tylko jeden z nich za każdym razem, gdy się budzi. Powinien cyklicznie przechodzić przez wszystkie z nich po kolei, aby uniknąć przepływu prądu stałego netto. Prowadzi jedną linię solidnie wysoko lub nisko, umieszcza słabe pullup / pullup na drugiej linii w przeciwnym kierunku, czeka chwilę, a następnie wykonuje odczyt A / D drugiej linii. Cztery przypadki dotyczą tego, która linia jest prowadzona i czy jest prowadzona wysoko czy nisko.
Po wykonaniu pełnego zestawu odczytów A / D powinieneś wiedzieć, czy istnieje wystarczające przewodzenie między dwiema liniami, aby zadeklarować łóżko zwilżony. Prawdopodobnie chcesz, aby to potwierdzono kilka razy z rzędu, aby mieć pewność. Kilka sekund opóźnienia nie będzie miało znaczenia, a to bardzo długi czas dla mikrokontrolera.
Dodane:
Oto więcej szczegółów na temat obwodu, o którym mówiłem:
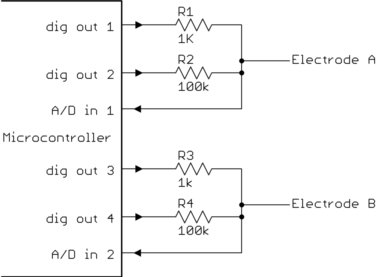
Na przykład, aby wykonać jeden z czterech odczytów, mikro ustawia wyjście cyfrowe 1 na wysokie, wyjście 4 na niskie, odczekaj chwilę (kilka ms), a następnie odczytaj wejście A / D 2. Bez połączenia między elektrodami, A / D odczyta 0. Przy bezpośrednim połączeniu odczytałby prawie pełną skalę, ponieważ rezystor sterujący 1K R1 jest 100 razy niższy niż opuszczony R4.
W praktyce można podwoić wejście A / D i pierwsze wyjście cyfrowe dla każdej linii, aby użyć tylko dwóch pinów mikrokontrolera na elektrodę. Pokazałem trzy osobne, aby funkcje były bardziej zrozumiałe.
Cztery różne kombinacje pochodzą z dwóch wyborów, która elektroda jest zasilana i która jest przewodem zwrotnym (A był napędzany, a B, jak w powyższym przykład) i czy elektroda napędzana jest wysoka czy niska (wysoka w powyższym przykładzie). Powodem tych pomiarów jest wyeliminowanie odchylenia spowodowanego jakimkolwiek efektem baterii, efektami diod i uniknięcie prądu stałego netto w celu utrzymania symetrii elektrody z powodu elektrolizy.
Powinieneś używać elektrod, które nie są skorodowane przez mocz, więc teoretycznie nie powinno być efektów diodowych ani baterii, ale coś się dzieje, a zrobienie logiki i tak jest trywialne.
Wyobrażałem sobie równoległe przewody, luźno przyszyte do górnej części materaca, poniżej któregokolwiek z prześcieradła, oddalone od siebie o może centymetr. Jedna para biegnąca przez spodziewany mokry obszar z boku na bok powinna wystarczyć, ale możesz użyć dwóch lub trzech przewodów dla każdej elektrody naprzemiennie, aby pokryć większy obszar.
Nie wiem, jaki dobry wybór drutu jest, ale na pewno nie miedź. Nichrome może być dobry, ale musisz się sprawdzić. Nie wiem, które metale nie zostaną skorodowane przez mocz, że można znaleźć druty, które nie kosztują fortuny. Na przykład złoto działałoby świetnie chemicznie i elektrycznie, ale łatwo pękałoby i oczywiście dużo kosztowało, nawet gdybyś mógł je znaleźć. Drut platynowy istnieje i może być odpowiedni, jeśli nie jest bardzo drogi. Najpierw sprawdź nichrom.
Dodano 2:
Najwyraźniej nadal jest niejasność co do sekwencji testowej, o której mówię. Oto 4 testy:
Num Dysk A Dysk B Odczyt --- ----------- ----------- ---- 1 silny wysoki słaby niski B 2 słaby niski silny wysoki A 3 silny niski słaby wysoki B 4 słaby wysoki silny niski A
Ostateczny wynik to (# 1 + # 2) - (# 3 + # 4). # 1 i # 2 powinny być wysokimi odczytami, a # 3 i # 4 niskimi. Wykonując wszystkie cztery i dodając wynik, jak pokazałem, eliminujesz zarówno szum w trybie wspólnym, jak i każdy stały sygnał różnicowy, który może być spowodowany efektem baterii spowodowanym korozją asymetryczną.
uwierz w to, popracuj nad przykładem lub dwoma.